Palletizing & Depalletizing Solutions – Flexible Robotics with 3D Vision
INOS offers modular, flexible automation systems that handle both palletizing and depalletizing tasks with high reliability and minimal human intervention. Built around advanced 3D vision and smart software, these solutions streamline material handling, increase throughput and enhance workplace safety.
Why Automate with INOS?

Higher Throughput & Efficiency
Our software analyzes 3D sensor data to calculate optimal stacking and unstacking strategies – whether for uniform or mixed pallets – enabling faster cycle times and significantly increased throughput.

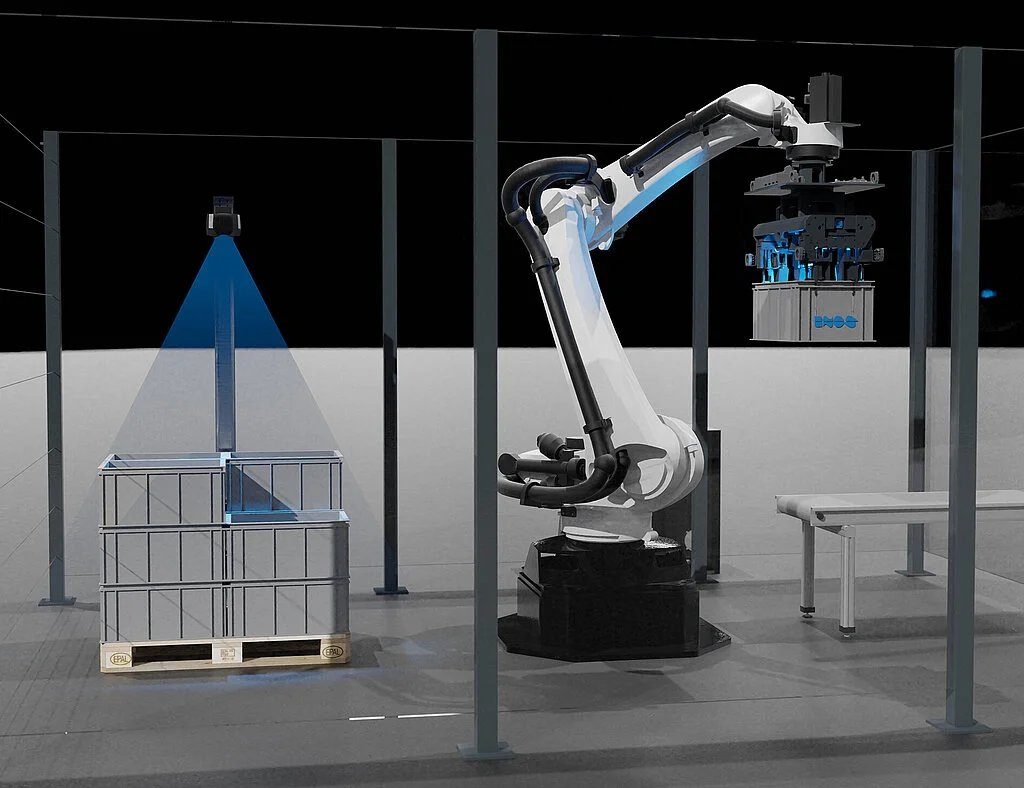
Vision-Guided Robotics
Robots equipped with INOS machine vision can “see” and adapt in real time. They detect the position, size and shape of packages – even irregular or mixed loads – without requiring precise pre-positioning.

Improved Safety & Ergonomics
Manual loading and unloading are physically demanding and risk injuries. Automated systems take over strenuous and repetitive tasks, reducing strain and creating safer workplaces.

Easy Integration & Operation
Plug-and-play components with standardized interfaces make integration into existing software and logistics systems straightforward. INOS also offers training and strong after-sales support.

Adaptable & Available
Modular robot or portal solutions flexibly scale with demand peaks and logistics fluctuations, increasing system availability across shifts.

Palletizing

Depalletizing
Vision sensors detect the coarse 3D positions of pallets and their contents.
The system formulates an optimized depalletizing plan and adjusts the gripper to the object.
Before each pick, the item is re-scanned to locate its exact position for precise handling.